|
fredshentu at berkeley dot edu I am a PhD student in the field of machine learning and robotics at UC Berkeley, advised by Professor Pieter Abbeel. Previously, I graduated from UC Berkeley majoring in Computer Science math and Physics. During my undergraduate study, I worked as an undergraduate research assistant in Berkeley Artificial Intelligence Research (BAIR) Lab. Post-graduation, I had the opportunity to be a founding engineer at Covariant AI. Witnessing the company's growth from an 8-person team to an almost 200-person enterprise spanning multiple continents was truly remarkable. Now, I have returned to academia to delve deeper into research. |

|
|
My research interest lies at the intersection of robotics, computer vision, and machine learning. I'm interested in developing algorithms which can make use of rich sensory data such as vision to not only make robot be able to complete complicated tasks but also improve themselves continuously by interacting with the environment. |

|
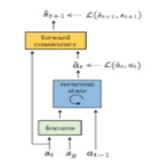
(In review) International Conference on Intelligent Robots and Systems (IROS) 2024 website, pdf we present Latent Codes as Bridges, or LCB, a new policy architecture for control that combines the benefits of modular hierarchical architectures with end-to-end learning |

|
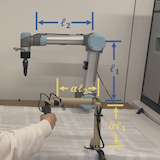
(In review) International Conference on Intelligent Robots and Systems (IROS) 2024 website, paper, code, hardware We propose GELLO, a general framework for building low-cost and intuitive teleoperation systems for robotic manipulation. |

|
European Conference on Computer Vision (ECCV), 2022 website, code, pdf We propose methods for leveraging the autoregressive model to make high confidence predictions and meaningful uncertainty measures for 3d bounding box prediction. |

|
Deep Learning in Robotics Vision Workshop (CVPR), 2018 (Oral) website, pdf We present a robotic system that learns to segment its visual observations into individual objects by experimenting with its environment in a completely self-supervised manner. |
|
Oral Presentation (ICLR), 2018 website, pdf We present a novel skill policy architecture and dynamics consistency loss which extend visual imitation to more complex environments while improving robustness. |
|
|
International Conference on Robotics and Automation (ICRA), 2017 We formalize the idea of safe learning in a probabilistic sense by defining an optimization problem: we desire to maximize the expected return while keeping the expected damage below a given safety limit. |
|
|
| TANG Haoran, Xi Chen, Yan Duan, Nikhil Mishra, Shiyao Wu, Maximilian Sieb, Yide Shentu |
| Yan Duan, Xi Chen, Mostafa Rohaninejad, Nikhil Mishra, Yu Xuan Liu, Andrew Amir Vaziri, Haoran TANG, Yide Shentu, Ian Rust, Carlos Florensa |
| Yide Shentu, David Mascharka, Tianhao Zhang, Yan Duan, Jasmine Deng, Xi Chen |
| Yan Duan, TANG Haoran, Yide Shentu, Nikhil Mishra, Xi Chen |